Imagina un robot diminuto, no más grande que la hoja de un árbol, que se desliza por la superficie de un estanque con la misma agilidad que un insecto zapatero.
Este tipo de máquinas podrían, en un futuro cercano, monitorear la contaminación o explorar zonas inundadas que son demasiado peligrosas para los humanos.
El método tradicional en robótica y su alto índice de fracaso
Hasta ahora, la producción de las películas delgadas y flexibles que son esenciales para la robótica blanda presentaba un obstáculo considerable.
Los investigadores debían fabricar estas frágiles capas sobre superficies sólidas, como el vidrio, para luego levantarlas y colocarlas con sumo cuidado sobre el agua.
Este proceso de transferencia era tan delicado que, con frecuencia, las películas se rasgaban o sufrían daños irreparables.
Este alto índice de fracaso dificultaba la creación y experimentación con micro-robots acuáticos funcionales, hasta ahora.
HydroSpread: ¿Cómo fabricar robots directamente sobre el agua?
Para resolver este problema, un equipo de la Escuela de Ingeniería y Ciencias Aplicadas de la Universidad de Virginia, liderado por el profesor Baoxing Xu, desarrolló un método de fabricación completamente nuevo.
La técnica, denominada HydroSpread, la cual utiliza el propio líquido como la superficie de trabajo.
Este enfoque permite que gotas de un polímero líquido se extiendan de manera natural sobre la superficie del agua, formando láminas ultrafinas y perfectamente uniformes.
Posteriormente, el equipo utiliza un láser de alta precisión para cortar y dar forma a estas láminas, creando patrones complejos directamente sobre el líquido.
Prototipos que imitan a la naturaleza
Utilizando este método, los investigadores construyeron dos prototipos funcionales que demuestran el potencial de la técnica.
Ambos se inspiran en los movimientos observados en el mundo natural para lograr su desplazamiento.
HydroFlexor y HydroBuckler
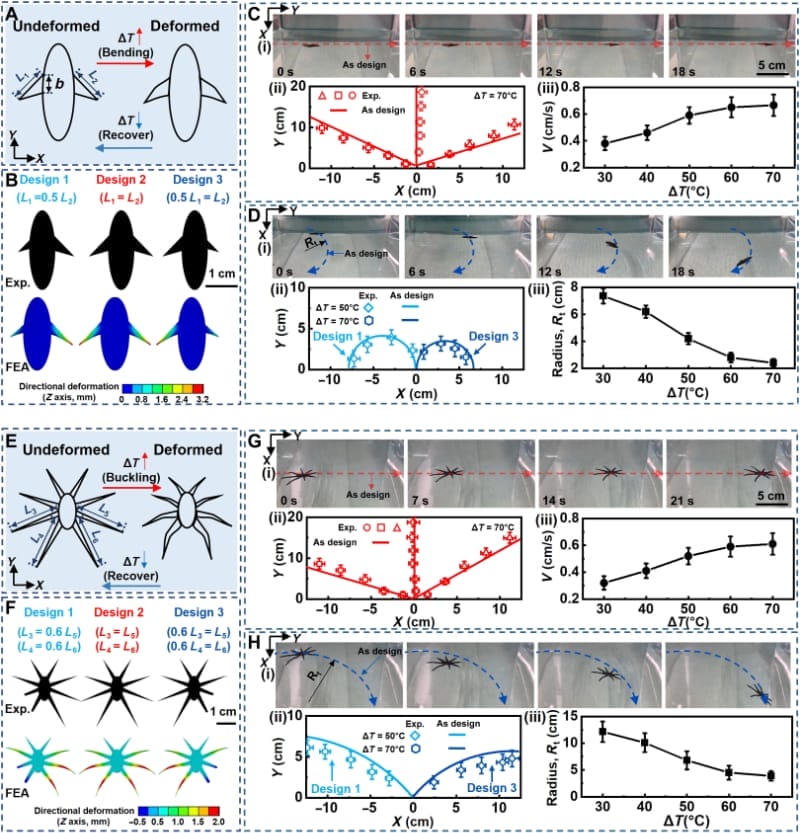
El primer prototipo, llamado HydroFlexor, se desplaza mediante movimientos de paleo similares a los de una aleta, permitiéndole remar sobre la superficie.
El segundo, HydroBuckler, imita a los insectos zapateros y «camina» hacia adelante gracias a un mecanismo de pandeo en sus patas.
Un motor basado en la física térmica
El movimiento de estos robots no depende de complejas piezas mecánicas, sino de una ingeniosa aplicación de la física.
Las películas de polímero están compuestas por capas con diferentes coeficientes de expansión térmica, lo que provoca que se doblen o pandeen cuando se calientan.
En el laboratorio, el equipo de Xu accionó los prototipos utilizando un calentador infrarrojo suspendido sobre ellos. Al absorber el calor, la estructura de las películas se deforma, generando así los movimientos de paleo o de caminar.
Control de movimiento a distancia
Al encender y apagar cíclicamente la fuente de calor, los investigadores lograron controlar la velocidad de los robots e incluso hacerlos girar. Esta capacidad demuestra que es posible un movimiento controlado y repetible sin necesidad de contacto físico.
El camino hacia los robots acuáticos autónomos
Aunque los prototipos actuales dependen de una fuente de calor externa, el equipo ya trabaja en futuras versiones completamente autónomas.
Estos robots podrían diseñarse para responder a la luz solar, a campos magnéticos o a diminutos calentadores integrados en su propia estructura.
Esta evolución abriría la puerta a la creación de enjambres de robots blandos capaces de moverse y adaptarse por sí mismos en entornos acuáticos.
Una solución a la fabricación de micro-robots funcionales
El método HydroSpread elimina uno de los mayores obstáculos en el campo de la robótica blanda al facilitar la creación de películas delicadas sin dañarlas.
Este avance tiene un alcance que va más allá de los robots acuáticos, ya que podría aplicarse en la creación de sensores médicos vestibles, electrónica flexible y monitores ambientales, herramientas que deben ser delgadas, suaves y duraderas en entornos donde los materiales rígidos tradicionales no son viables.